(1)自校正控制系統(tǒng) 也稱為參數(shù)自適應(yīng)系統(tǒng)。此系統(tǒng)必須對對象(過程)進(jìn)行辨識,然后將系統(tǒng)期望的或最優(yōu)的性能進(jìn)行比較,使系統(tǒng)趨向最優(yōu)的性能的決策。最后,再對控制器進(jìn)行適當(dāng)?shù)男拚允瓜到y(tǒng)接近最優(yōu)狀態(tài)。這些是自校正自適應(yīng)系統(tǒng)具備的基本功能,其典型控制框圖見圖48-14。此系統(tǒng)的缺點是:參數(shù)的估計要從零開始,使之在系統(tǒng)過渡過程階段不能應(yīng)用。
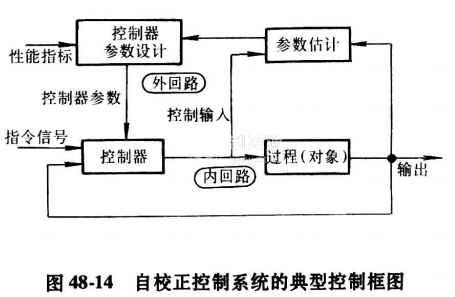
自校正控制器主要進(jìn)行在線參數(shù)估計和控制器參數(shù)的在線設(shè)計。由于存在多種參數(shù)估計和控制器設(shè)計方法,因此,它的設(shè)計十分靈活,也得到較廣泛的應(yīng)用。
(2)模型參考自適應(yīng)控制系統(tǒng) 此系統(tǒng)在制冷空調(diào)系統(tǒng)控制中,將會有明顯的應(yīng)用前景,特點是實現(xiàn)容易,自適應(yīng)速度快。
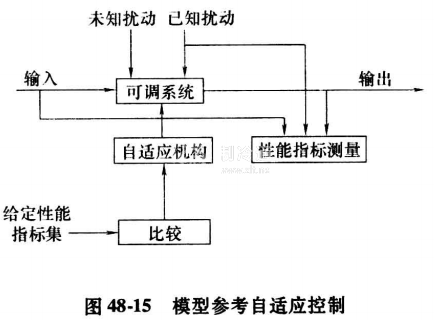
模型參考自適應(yīng)系統(tǒng)就是利用它的一個可調(diào)系統(tǒng)(包括對象及控制器)的輸入狀態(tài)和輸出變量.來度傲某個性能指標(biāo),然后根據(jù)實測性能指標(biāo)值,與給定性能指標(biāo)值相比較的結(jié)果,由自適應(yīng)機(jī)構(gòu)修正可調(diào)系統(tǒng)的參數(shù),產(chǎn)生一個輔助輸入信號,以保持控制系統(tǒng)的性能接近給定的性能指標(biāo)值。模型自適應(yīng)控制的定義說明見圖48-15。
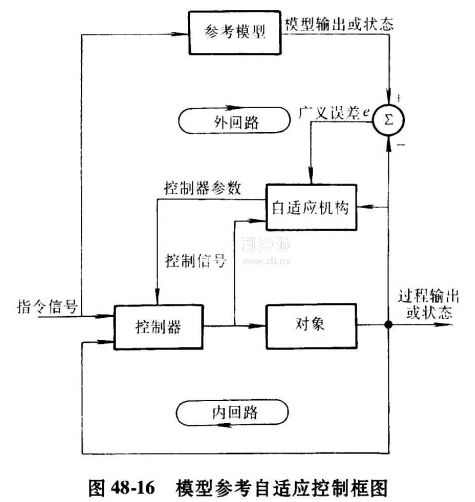
同自校正控制系統(tǒng)一樣,模型參考自適應(yīng)控制系統(tǒng)也劃分為兩個反饋回路:內(nèi)回路是由對象和控制器組成的常規(guī)反饋回路;外回路是調(diào)整控制參數(shù)的自適應(yīng)回路。調(diào)整方法都是基于對象的輸人與輸出信號的測縫。在這個回路中,引入了一個稱為參考模的輔助系統(tǒng)。這個輔助系統(tǒng)與可調(diào)系統(tǒng)的指令輸人相聯(lián),也與這個參考模型的輸入相聯(lián),所以模型的輸出和狀態(tài),就可用來規(guī)定希望的性能指標(biāo)。其基本控制框圖如圖48-16所示。